About Me

I am a co-founder and the CEO of Sydekick Robotics, where we are building the deployment layer for Physical AI. Previously, I was a postdoctoral researcher at the QUT Centre for Robotics (QCR), working on robot learning which lies at the intersection of AI and robotics with a focus on teaching robots to intelligently plan and interact with the world in order to solve everyday tasks. I completed my PhD at the Australian Centre for Robotic Vision (ACRV), focusing on combining reinforcement learning and control theory for safe real-world deployment. Feel free to contact me via ranak@sydekick.bot if you are interested in my line of research and applying it to solve real-world industrial problems, including manufacturing, product assembly, logistics, and agriculture.
Publications
-
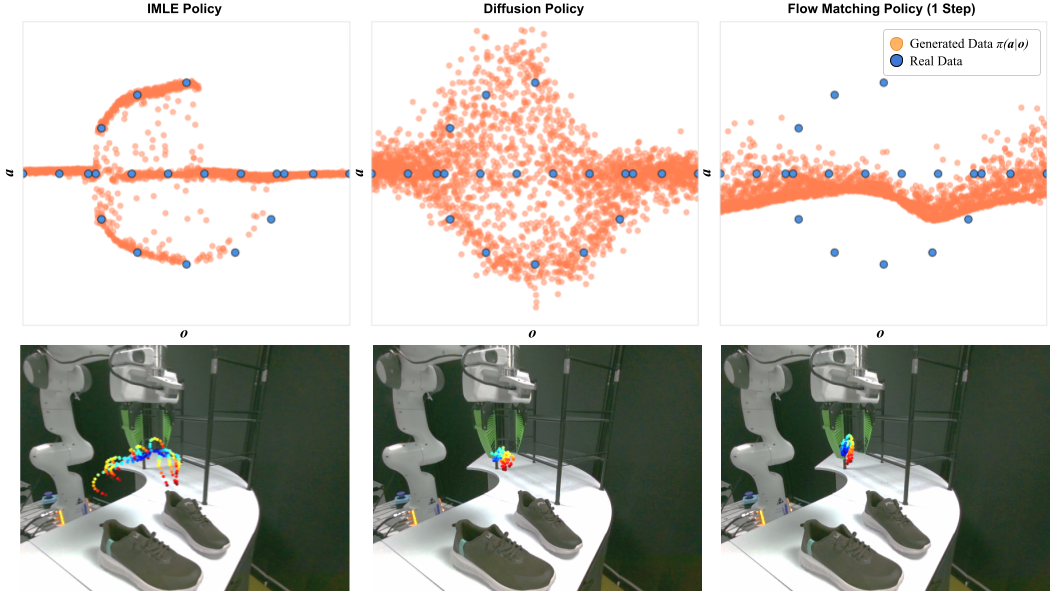 Rana, K., Lee, R., Pershouse, D., & Sünderhauf, N. “IMLE Policy:
Fast and Sample Efficient Visuomotor Policy Learning via Implicit Maximum Likelihood Estimation” 2025 Robotics: Science and Systems(RSS)
Rana, K., Lee, R., Pershouse, D., & Sünderhauf, N. “IMLE Policy:
Fast and Sample Efficient Visuomotor Policy Learning via Implicit Maximum Likelihood Estimation” 2025 Robotics: Science and Systems(RSS)
[Paper] [Site] -
 Abou-Chakra, J., Sun, L., Rana, K., May, B., Schmeckpeper, K., Mnniti, M., Herlant, L., & Sünderhauf, N. “Real-is-Sim: Bridging the Sim-to-Real Gap with a Dynamic Digital Twin for Real-World Robot Policy Evaluation” [under review - CoRL 2025])
Abou-Chakra, J., Sun, L., Rana, K., May, B., Schmeckpeper, K., Mnniti, M., Herlant, L., & Sünderhauf, N. “Real-is-Sim: Bridging the Sim-to-Real Gap with a Dynamic Digital Twin for Real-World Robot Policy Evaluation” [under review - CoRL 2025])
[Paper] [Site] -
 Rana, K., Abou-Chakra, J., Garg, S., Lee, R., Reid, I., & Sünderhauf, N. “Affordance-Centric Policy Decomposition :
Generalisable and Sample Efficient Robot Policy Learning for Multi-Object, Long-Horizon Manipulation” [under review])
Rana, K., Abou-Chakra, J., Garg, S., Lee, R., Reid, I., & Sünderhauf, N. “Affordance-Centric Policy Decomposition :
Generalisable and Sample Efficient Robot Policy Learning for Multi-Object, Long-Horizon Manipulation” [under review])
[Paper] [Site] -
 Abou-Chakra, J., Rana, K., Dayoub, F., & Sünderhauf, N. “Physically Embodied Gaussian Splatting: A Realtime Correctable World Model for Robotics” 2024 Conference on Robot Learning (CoRL)
Abou-Chakra, J., Rana, K., Dayoub, F., & Sünderhauf, N. “Physically Embodied Gaussian Splatting: A Realtime Correctable World Model for Robotics” 2024 Conference on Robot Learning (CoRL)
[Paper] [Site] -
 Open X-Embodiment Collaboration “Open X-Embodiment: Robotic Learning Datasets and RT-X Models” 2024 International Conference on Robotics and Automation (ICRA) (Best Conference Paper | Best Manipulation Paper Finalist | Best Student Paper Finalist)
Open X-Embodiment Collaboration “Open X-Embodiment: Robotic Learning Datasets and RT-X Models” 2024 International Conference on Robotics and Automation (ICRA) (Best Conference Paper | Best Manipulation Paper Finalist | Best Student Paper Finalist)
[Paper] [Site] -
 Rana, K., Haviland, J., Garg, S., Abou-Chakra, J., Reid, I., & Sünderhauf, N. “SayPlan: Grounding Large Language Models using 3D Scene Graphs for Scalable Robot Task Planning” 2023 Conference on Robot Learning (CoRL)
Rana, K., Haviland, J., Garg, S., Abou-Chakra, J., Reid, I., & Sünderhauf, N. “SayPlan: Grounding Large Language Models using 3D Scene Graphs for Scalable Robot Task Planning” 2023 Conference on Robot Learning (CoRL)
(Oral Presentation)
[Paper] [Site] -
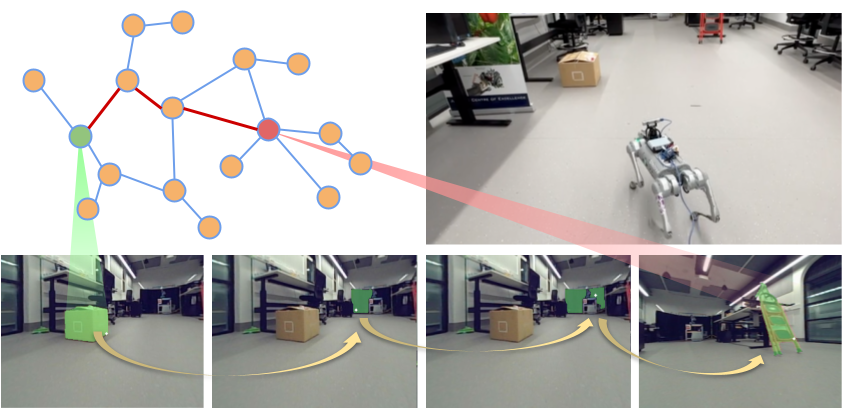 Garg, S., Rana, K., Hosseinzadeh, M., Mares, L., Sünderhauf, N., Dayoub, F., & Reid, I. “RoboHop: Segment-based Topological Map Representation for
Open-World Visual Navigation” 2024 International Conference on Robotics and Automation (ICRA)
Garg, S., Rana, K., Hosseinzadeh, M., Mares, L., Sünderhauf, N., Dayoub, F., & Reid, I. “RoboHop: Segment-based Topological Map Representation for
Open-World Visual Navigation” 2024 International Conference on Robotics and Automation (ICRA)
[Paper] [Site] -
 Rana, K., Melnik, A., & Sünderhauf, N. “Contrastive Language, Action, and State
Pre-training for Robot Learning” 2024 International Conference on Robotics and Automation (ICRA) Pretraining for Robotics Workshop
Rana, K., Melnik, A., & Sünderhauf, N. “Contrastive Language, Action, and State
Pre-training for Robot Learning” 2024 International Conference on Robotics and Automation (ICRA) Pretraining for Robotics Workshop
[Paper] -
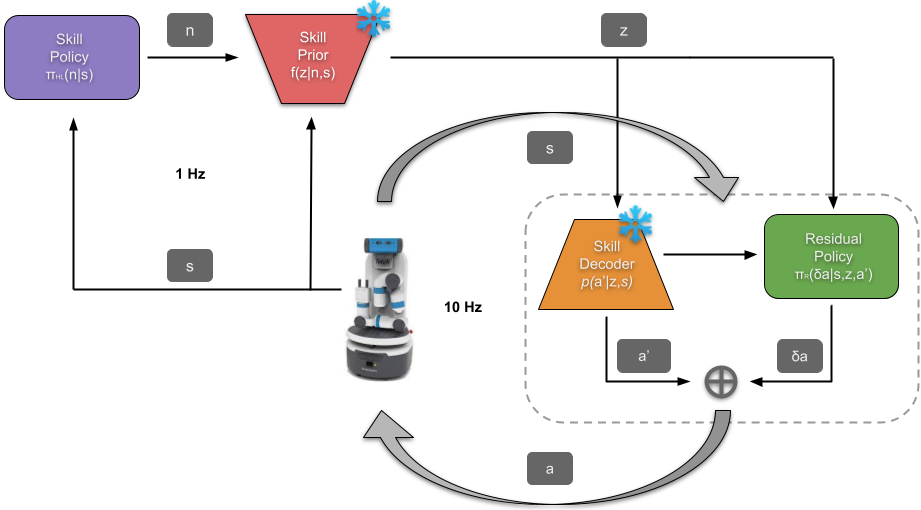 Rana, K., Milford, M., & Sünderhauf, N. “Residual Skill Policies: Learning an Adaptable Skill Space for Reinforcement Learning for Robotics” 2022 Conference on Robot Learning (CoRL)
Rana, K., Milford, M., & Sünderhauf, N. “Residual Skill Policies: Learning an Adaptable Skill Space for Reinforcement Learning for Robotics” 2022 Conference on Robot Learning (CoRL)
[Paper] [Code] [Site] -
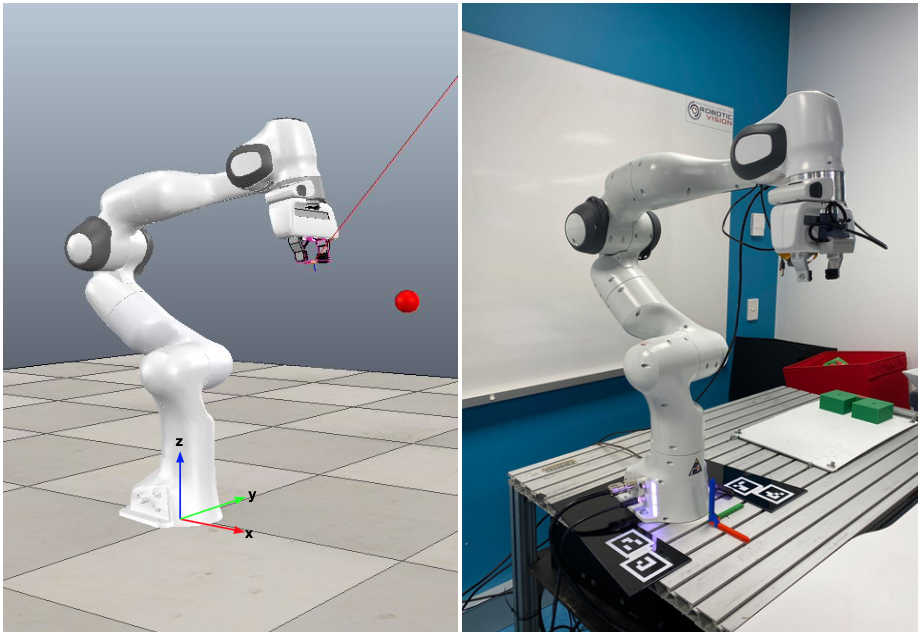 Rana, K., Dasagi, V., Haviland, J., Milford, M., & Sünderhauf, N. “Zero-Shot Uncertainty-Aware Deployment of Simulation Trained Policies on Real-World Robots” NeurIPS 2021 Workshop on Deployable Decision Making in Embodied Systems (DDM) (Spotlight Presentation)
Rana, K., Dasagi, V., Haviland, J., Milford, M., & Sünderhauf, N. “Zero-Shot Uncertainty-Aware Deployment of Simulation Trained Policies on Real-World Robots” NeurIPS 2021 Workshop on Deployable Decision Making in Embodied Systems (DDM) (Spotlight Presentation)
[Paper] [Code] [Site] -
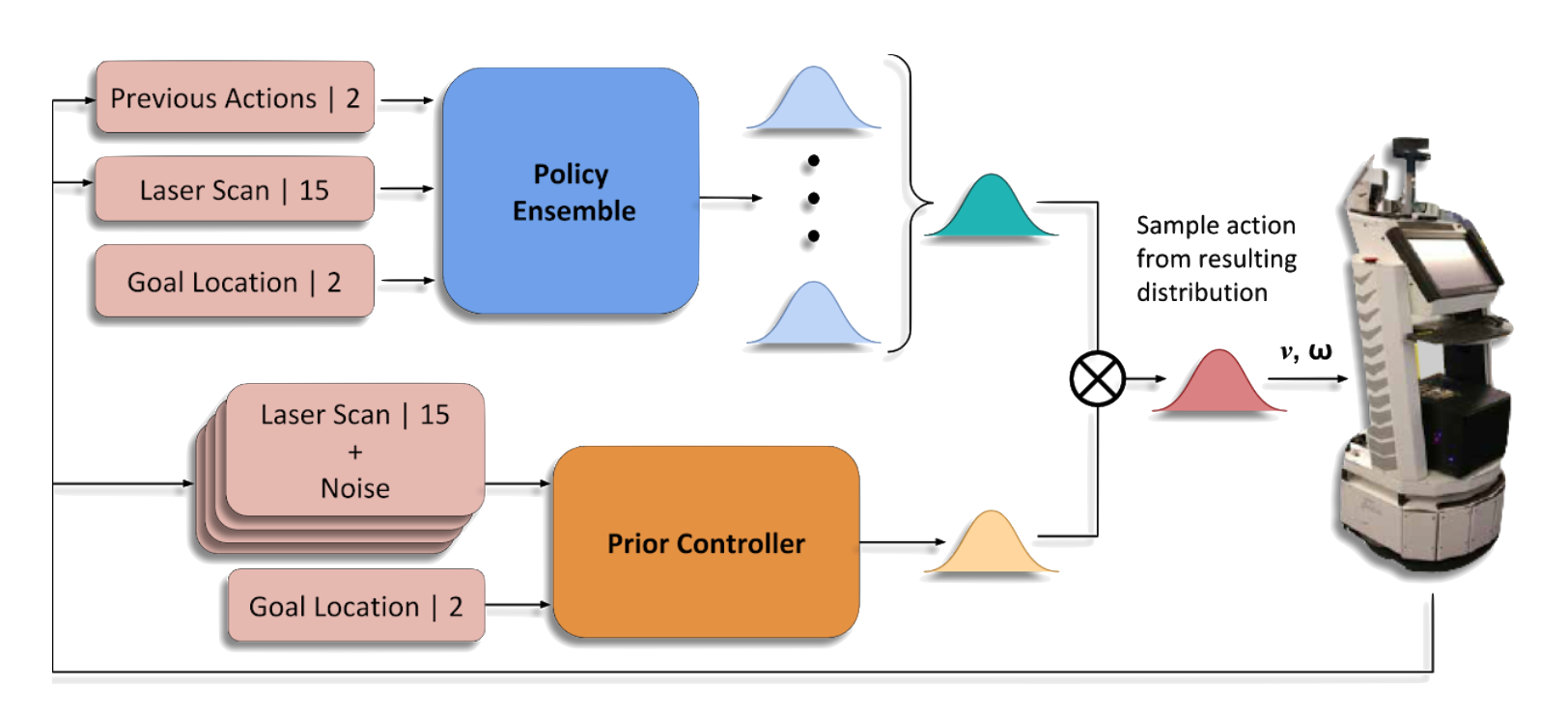
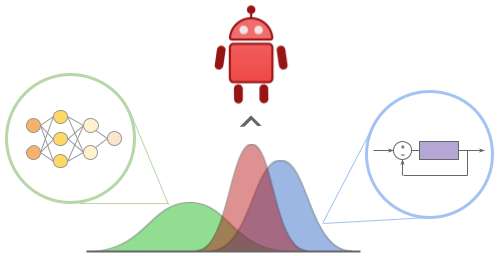 Rana, K., Dasagi, V., Haviland, J., Milford, M., & Sünderhauf, N. “Bayesian Controller Fusion: Leveraging Control Priors in Deep Reinforcement Learning for Robotics” The International Journal of Robotics Research (IJRR)
Rana, K., Dasagi, V., Haviland, J., Milford, M., & Sünderhauf, N. “Bayesian Controller Fusion: Leveraging Control Priors in Deep Reinforcement Learning for Robotics” The International Journal of Robotics Research (IJRR)
[Paper] [Code] [Site] -
 Rana, K., Dasagi, V., Talbot, B., Milford, M., & Sunderhauf, N. (2020). “Multiplicative Controller Fusion: Leveraging Algorithmic Priors for Sample-efficient Reinforcement Learning and Safe Sim-To-Real Transfer”. 2020 International Conference on Intelligent Robots and Systems (IROS)
Rana, K., Dasagi, V., Talbot, B., Milford, M., & Sunderhauf, N. (2020). “Multiplicative Controller Fusion: Leveraging Algorithmic Priors for Sample-efficient Reinforcement Learning and Safe Sim-To-Real Transfer”. 2020 International Conference on Intelligent Robots and Systems (IROS)
[Paper] [Code] [Site] -
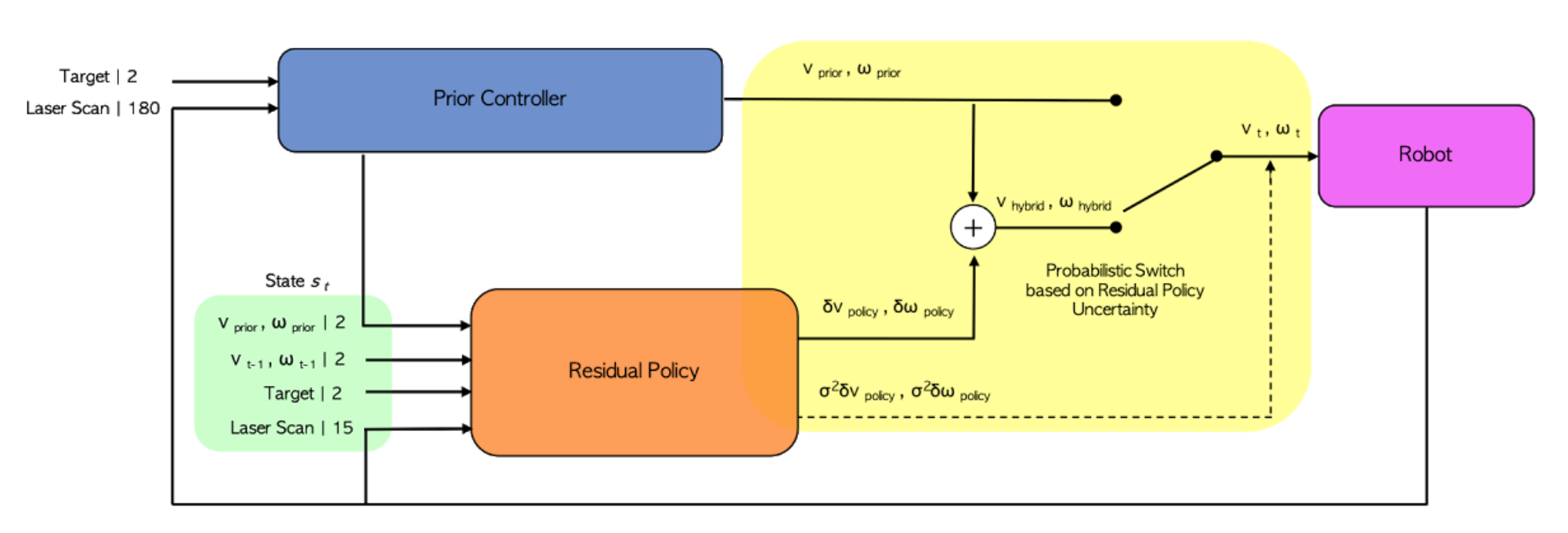 Rana, K., Talbot, B., Milford, M., & Sünderhauf, N. (2020). “Residual Reactive Navigation: Combining Classical and Learned Navigation Strategies For Deployment in Unknown Environments”. 2020 IEEE International Conference on Robotics and Automation (ICRA), 11493-11499.
Rana, K., Talbot, B., Milford, M., & Sünderhauf, N. (2020). “Residual Reactive Navigation: Combining Classical and Learned Navigation Strategies For Deployment in Unknown Environments”. 2020 IEEE International Conference on Robotics and Automation (ICRA), 11493-11499.
[Paper] [Code] [Site] -
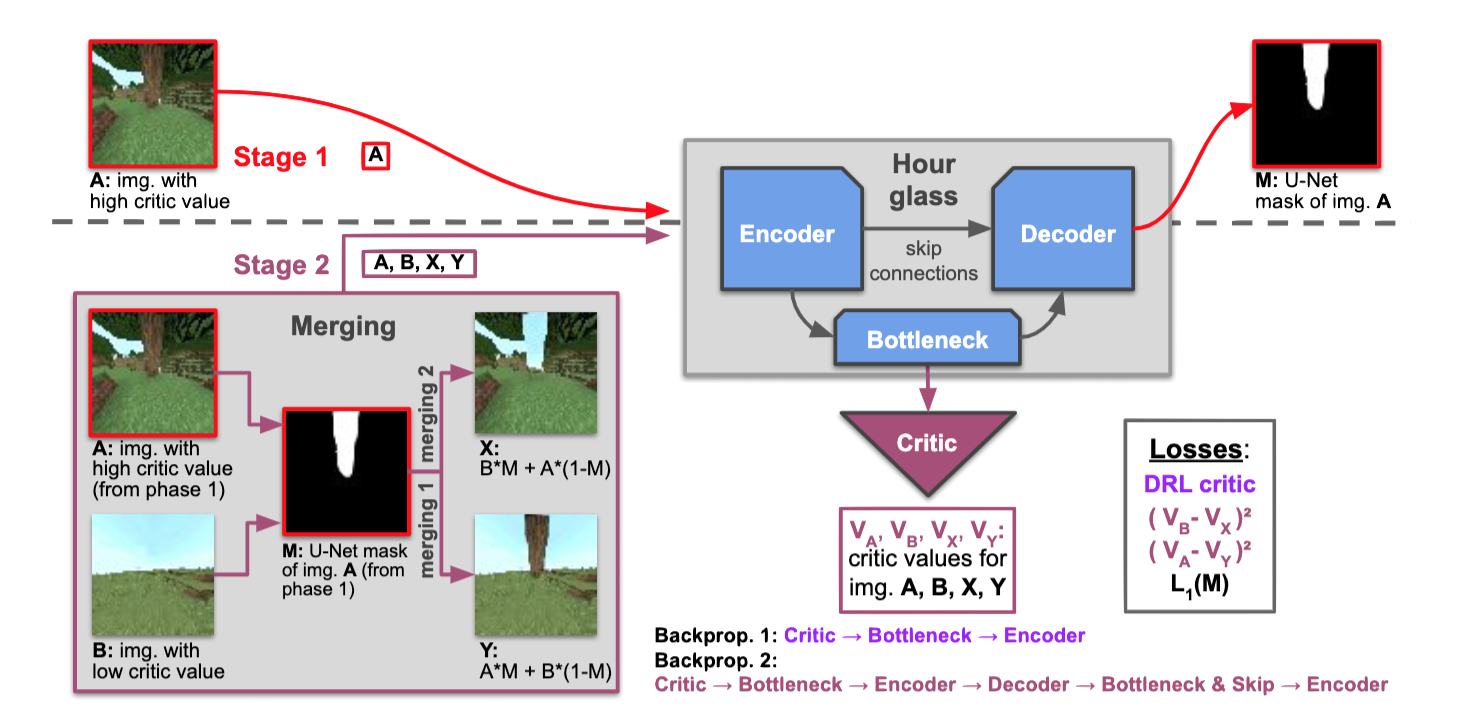 Melnik, A., Harter, A., Limberg, C., Rana, K., Sünderhauf, N., & Ritter, H. “Critic Guided Segmentation of Rewarding Objects in First Person Views”. German Conference of Artificial Intelligence, 2021.
Melnik, A., Harter, A., Limberg, C., Rana, K., Sünderhauf, N., & Ritter, H. “Critic Guided Segmentation of Rewarding Objects in First Person Views”. German Conference of Artificial Intelligence, 2021.
[Paper] -
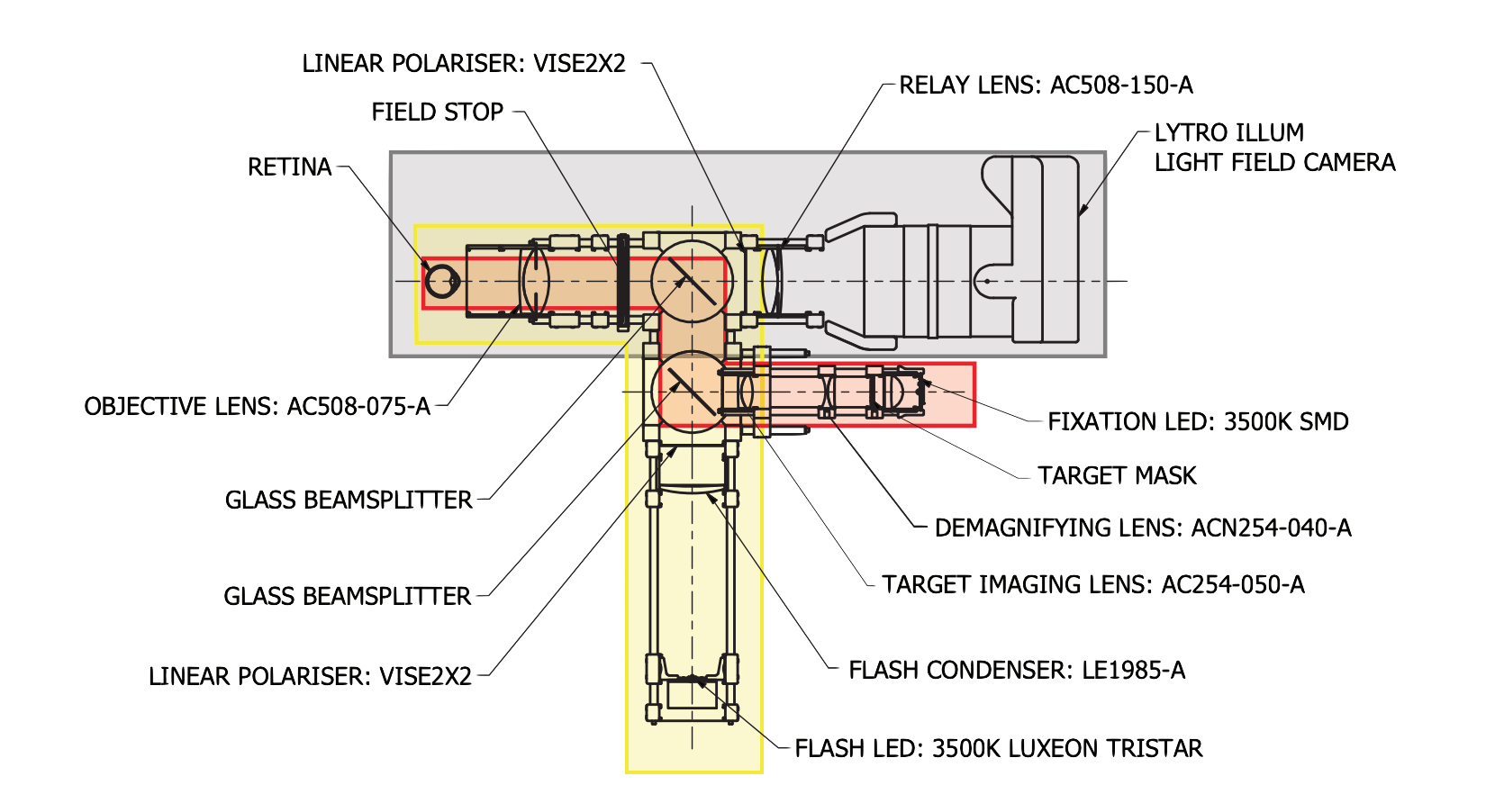 Palmer, D.W., Coppin, T., Rana, K., Dansereau, D., Suheimat, M., Maynard, M., Atchison, D., Roberts, J., Crawford, R., & Jaiprakash, A. (2018). “Glare-free retinal imaging using a portable light field fundus camera”. Biomedical Optics Express, 9, 3178 - 3192.
Palmer, D.W., Coppin, T., Rana, K., Dansereau, D., Suheimat, M., Maynard, M., Atchison, D., Roberts, J., Crawford, R., & Jaiprakash, A. (2018). “Glare-free retinal imaging using a portable light field fundus camera”. Biomedical Optics Express, 9, 3178 - 3192.
[Paper] -
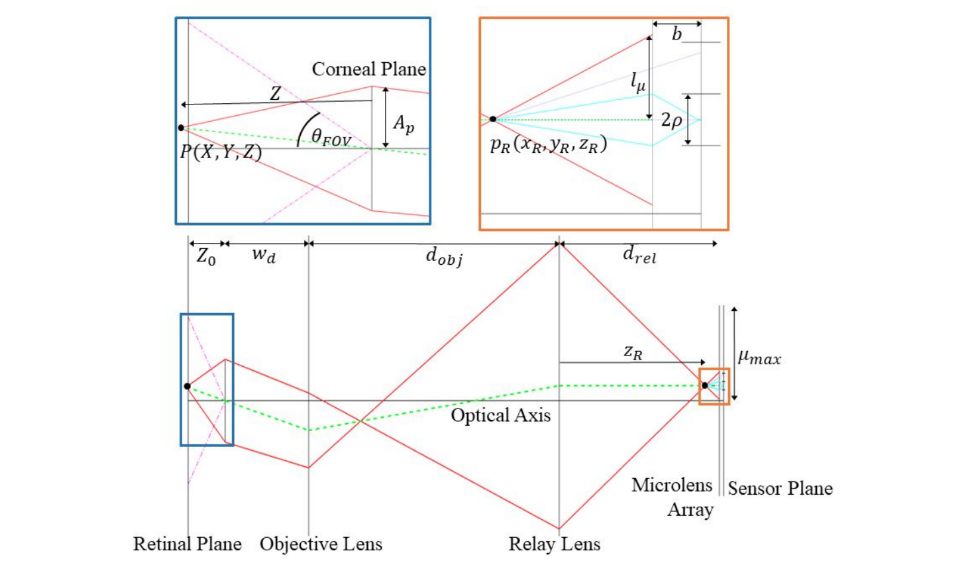 Coppin, T., Palmer, D.W., Rana, K., Dansereau, D., Collins, M., Atchison, D., Roberts, J., Crawford, R., & Jaiprakash, A. (2021). “Design of a Focused Light Field Fundus Camera for Retinal Imaging”. [Under review for IEEE Transactions on Medical Imaging (T-MI)]
Coppin, T., Palmer, D.W., Rana, K., Dansereau, D., Collins, M., Atchison, D., Roberts, J., Crawford, R., & Jaiprakash, A. (2021). “Design of a Focused Light Field Fundus Camera for Retinal Imaging”. [Under review for IEEE Transactions on Medical Imaging (T-MI)]
Organised Workshops
- Pretraining For Robotics Workshop - International Conference on Robotics and Automation (ICRA) 2024 [Site]
- Behaviour Priors in Reinforcement Learning for Robotics Workshop - International Conference on Robotics and Automation (ICRA) 2022 [Site]
- Semantics for Robotics - Robotics: Science and Systems (RSS) 2024 [Site]
- Semantics for Robotics - Robotics: Science and Systems (RSS) 2025 [Site]
- Workshop on Lifelong Learning for Home Robots - Conference on Robot Learning (CoRL) 2024 [Site]
Invited Talks
- Scaling Robot Learning - CSIRO Data61
- Pretraining for Robot Learning - Australian Institue for Machine Learning (AIML)
- Grounding Large Language Models using 3D Scene Graphs for Scalable Robot Task Planning - QUT Centre for Robotics (Mid Year Retreat)
- Scaling Robot Learning - Technical University of Darmstadt
- Accelerating Reinforcement Learning - Centre for Cognitive Interaction Technology, University of Bielefeld
Patents
-
Method and System for Robot Feedback Data Collection and Refinement
Patent Number AU2025900257A, US Pat. Appln. No. 19/466,305
Sydekick Robotics Pty. Ltd. -
Method and System for Generating a Robot Task Plan
Patent Number au2023904229
K. Rana, N. Suenderhauf -
Ophthalmic Imaging Apparatus and System
Patent Number au2017901153
A. Jaiprakash, D. Palmer, D. G. Dansereau, T. Coppin, K. Rana, J. Roberts, R. Crawford -
Method and System for Calibrating an Ophthalmic Imager
Patent Number au2018900513
D. Palmer, T. Coppin, K. Rana
Grants
- QCR Early Career Researcher Grant Award: Learning an Instance and View-Point Invariant Manipulation Skills Database for Service Robots 2022-2023
- UA-DAAD Australia-Germany Joint Research Cooperation Scheme Project: Sample-efficient learning for autonomous agents in complex hierarchical, and sparse environments 2020-2023
Teaching
- Lecturer: IFN680 Artificial Intelligence and Machine Learning (Masters Specialisation Unit) 2023
- Tutor: DXB211 Creative Coding 2020-2021